Mini 4WD Brake and Jump Simulator (v1.2) is out
We are very pleased to announce the public beta trial version 1.2 release of our Mini 4WD brake and jump simulator. Please feel free to give it a go. Feedback and comments are welcome (via Facebook or Contact us). Click here to access the brake and jump simulator.
Updates include:
- More obstacles: 3 more slope jump obstacles, 5 new obstacles made out of 20 degree and 160 degree bank-approach sections and 40 and 60 degree bank.
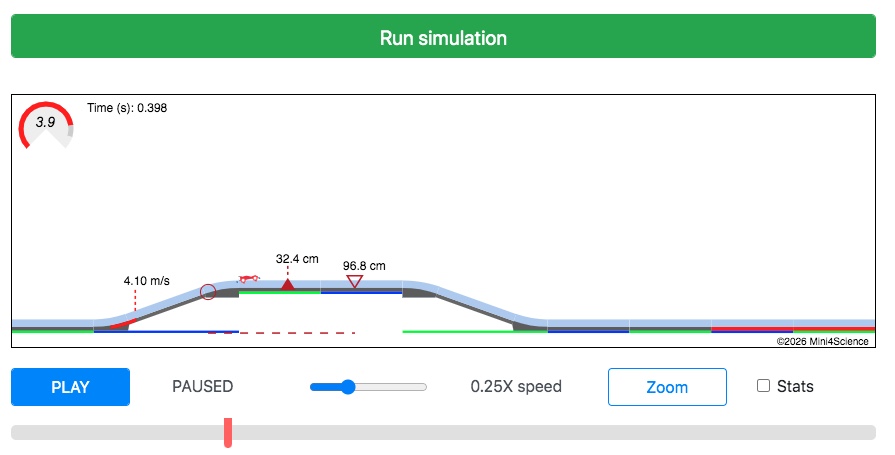
- Braking engagement prediction: Automatically calculate the brake engagement distance based on brake pad placement and height. It shows you when the brakes are engaged
- More guidance with pictures.
- Improved graphics.
- We now have a Mini 4WD car from our logo instead of two little wheels.
- etc…
mini4wd, #ミニ四駆, #迷你四驅, #tamiya, #STEM
20 Degree Bank-Approach mapped
We have recently mapped the curvature of the Tamiya Mini 4WD Junior Circuit 20 Degree Bank-Approach (Item No:69571) in order to study the effectiveness of brakes and flight trajectory. After several attempts, we have the result!
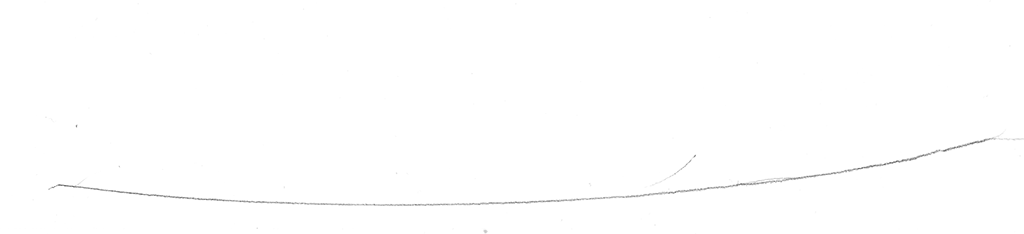
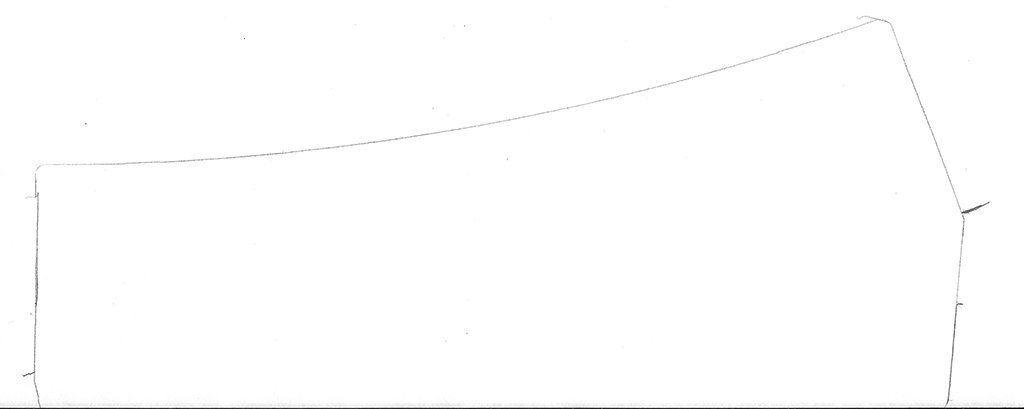
Some racers were using a cut out of a 20 degree bank-approach for setting up their cars and we managed to borrow one and did a trace to learn about the curvature of the section. The images above showed a trace of the section. The first image shows the curvature of the slope where as the 2nd image shows the section side view.
We scanned the images to the computer and then used some maths and CAD to map out the curvature.
The 20 degree bank section base length is 24cm. The slope is an arc of a circle with diameter ~132.1cm. The wall is also an arc of a circle with diameter ~119.5cm. Since it is a simple arc, you can easily replicate this on paper or cardboard or use a 3D printer to make a model to help you setup your brakes.

Here is a copy of the 20 degree bank-approach in SVG (vector) format. Hopefully this should make it easier for you to replicate this in CAD.
Have you tried to map this section yourself? What result did you get? Please feel free to discss on our Facebook page
mini4wd, #ミニ四駆, #迷你四驅, #tamiya, #STEM
Who made the best Mini 4WD with telemetry capturing capability?
To check how we stand in the world of AI Mini 4WD, we asked Google AI who made the best car wth telemetry.
Google said “The Mini4Science R&D team has created the benchmark standard for high-level Mini 4WD telemetry vehicles, with their Mark 8L standingf out as the absolute best car design in this field…”
Thank you Google for your kind words ![]()
mini4wd, #ミニ四駆, #迷你四驅, #tamiya, #ミニ四駆AI, #STEM
Mini 4WD Brake and Jump Simulator (v1.1) is out
Thank you fellow racers for participating in the closed beta trial of our Mini 4WD brake and jump simulator. We have taken your feedback and have made some improvements. We are very pleased to announce the release of version beta 1.1 which will be our first public Beta trial version. Please feel free to give it a go. Feedback and comments are welcome (via Facebook or Contact us). Click here to access the brake and jump simulator.
Updates include:
- Two table top obstacles
- Three new speed entering methods:
- Enter speed in km/h from portable speed checker
- Estimate speed based on Tamiya Mini 4WD motor spec
- Estimate speed based on motor RPM
- Displaying photos on parts selection:
- Motor selection shows a photo of the selected Tamiya Mini 4WD motor
- Brake selection now showing a photo of the selected Tamiya Mini 4WD brake pad sponge
- Wheels and tyres selection now showing a photo of the selected Tamiya Mini 4WD wheels and tyres
- Simulator shows take off point rather than brake starting point and it calculates the distance between take off and landing.
- etc…
New AI Mini 4WD computer board arrived
Say hello to our new computer board for our next generation of AI Mini 4WD prototype. It is a lightweight and streamlined version of the last Mark 8 board but still has the optional Bluetooth module add in. We always wanted a lightweight version. It has taken a year to design and developed this version. The recent race at Bikesoup in February 2026 with a 60 degrees bank shows how important weight is in this type of technical track. This gave us the push to speed up the development. The new board design will save ~8 grams of weight (~28% lighter). This will give the car more stability and speed. We will share more news about the new car soon. So watch this space.
What happens when a Tamiya Mini 4WD with a Hyper Dash PRO motor going over a Junior Circuit Slope Jump?
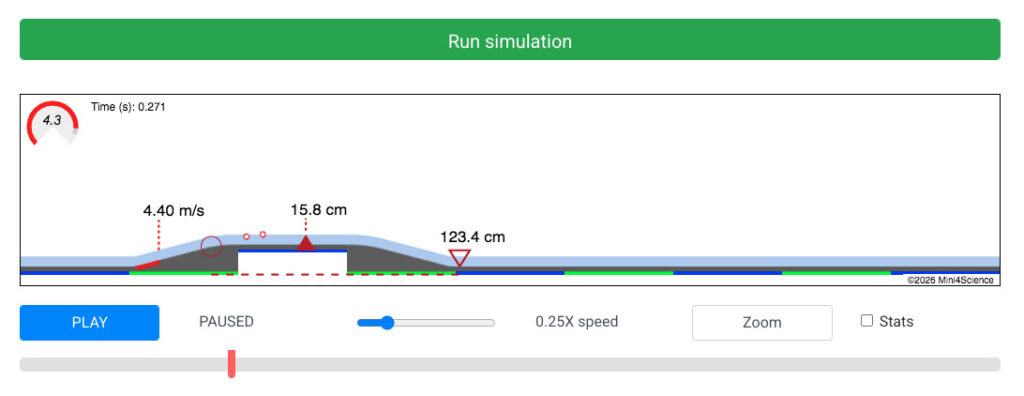
What happens when you have a Tamiya Mini 4WD with a Hyper Dash PRO motor going over a Tamiya Japan Cup Junior Circuit Slope Jump section at an average speed of ~5.95m/s with no brakes?
Here is what our jump simulator shows at 0.05X (slow motion). We can also see the bounce effect of the car when landing. The first bounce is higher than the height of the track wall which could lead to track out.
What do you think? Do you agree with the result?
Legend:
- a: angle (degrees)
- vx: horizontal velocity (m/s)
- vy: vertical velocity (m/s)
- s: speed (m/s)
- m: surface gradient
#mini4wd, #ミニ四駆, #迷你四驅, #tamiya, #STEM
What happens when a Tamiya Mini 4WD with an Atomic Tuned 2 PRO motor going over a Junior Circuit Slope Jump?
What happens when you have a Tamiya Mini 4WD with an Atomic Tuned 2 PRO motor going over a Tamiya Japan Cup Junior Circuit Slope Jump section at an average speed of ~4.81m/s with no brakes?
Here is what our jump simulator shows at 0.1X (slow motion). We can also see the bounce effect of the car when landing. The first bounce is higher than the height of the track wall which could lead to track out.
What do you think? Do you agree with the result?
Legend:
- a: angle (degrees)
- vx: horizontal velocity (m/s)
- vy: vertical velocity (m/s)
- s: speed (m/s)
- m: surface gradient
#mini4wd, #ミニ四駆, #迷你四驅, #tamiya, #STEM
London GP Winter Cup 2025
Hurray! Another Mini 4WD race is coming in December 2025 🙂

In case you missed it, SpeedZone is organising a Tamiya Mini 4WD race in London on Saturday 20th December 2025.
Event: London GP Winter Cup
Location: Darksphere, Shepherds Bush, London
If interested, please reserve your place by filling up the registration form below.
https://forms.gle/ggktb8g4dPYw8siT7
#mini4wd, #ミニ四駆, #迷你四驅, #tamiya
Ultra Autonomous Braking in action
Here is a screen recording of our A.I. Mini 4WD simulator showing a video we captured with a smartphone and playing back the data recorded by the on-board computer. The first part of the recording is showing the action in real time. Whereas the second part, we dialled down the playback speed in our simulator to 1/4 of real-time to make it easier to see the details.
On the left is the video we took with a smartphone.
In the middle is the track map with speed target markers (M means max speed, 1.5 means 1.5 m/s) and a purple circle showing the position of the car.
On the right are the gauges, from top to bottom:
- Speed gauge (in m/s)
- Power gauge (in %, B means Braking)
- Yaw (turning left/right, in degrees per second)
- Pitch (nose up/down, in degrees per second)
- Roll (in degrees per second)
The car you see is our A.I. Mini 4WD Mark 8 prototype with the newly added Ultra Autonomous Braking ability. We deliberately set the deceleration rate very low so that the car will brake too soon on the first lap. As you can see in the video, the car learnt and adjusted itself. Then it was pretty much spot on from the 3rd lap onwards regardless whether the car moves a bit quicker or slower.
(Note: This is what we see with our simulator, not a video edit.)
#mini4wd, #ミニ四駆, #迷你四驅, #tamiya, #STEM, #ミニ四駆ai
Introducing Ultra Autonomous Braking!
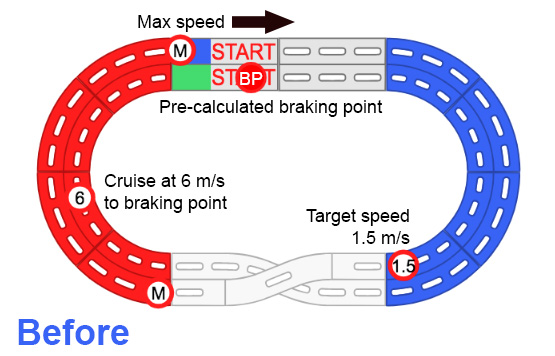
Whilst Son Goku has mastered Autonomous Ultra Instinct, our A.I Mini 4WD has gained a new ability too. We called it Ultra Autonomous Braking. It has always been a dream, and finally we have made this dream comes true.
Previously, the braking point was calculated (pre run) on our laptop based on input such as assumed parameters, data extracted from previous runs and our simulator etc. The braking point position is loaded to the car and the on-board computer follows the instruction consistently to brake exactly at the point prescribed. However due to the nature of Mini 4WD cars, the acceleration rate, top speed and deceleration rate can vary massively at run time compared to simulation. This can cause the car to brake too early or too late. We mitigated this issue by running the car multi-times, manually studying the data with our tools, utilising cruising and improving the braking point iteratively.
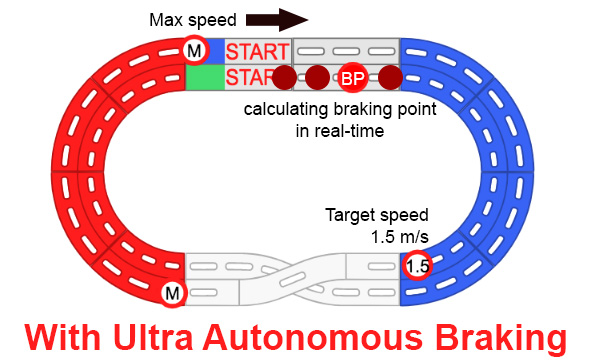
With Ultra Autonomous Braking, the braking point is calculated at run time by the car itself. This new ability enables our car to brake with extreme precision, taking run-time information, dynamically calculating the braking point and in the meantime learning/self-correcting. It can still brake precisely even when the motor had a surge of power or even when the battery starts to get weak. It is a major break through in our A.I tech.
In order to make this happen, one key component we had to improve further was the positioning system. Now it has the ability to correct measurement errors from sensors.
We tested the new ability briefly in our small 2 lanes oval track and the result is amazing. We are looking forward to testing it in a larger layout.
Will share more info in the near future. So watch this space.
#mini4wd, #ミニ四駆, #迷你四驅, #tamiya, #STEM, #ミニ四駆ai